 電子工作(マイコン全般)
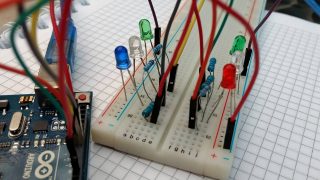
電子工作(マイコン全般) BluetoothでLチカ!マイコンをスマホから操作する方法
Bluetoothの無線通信でスマホからマイコン(Arduino/RaspberryPi)を制御してみます。概要 スマホアプリ(Android)を作成してみました。スマホアプリの作成はかなり久しぶり、たぶん10年くらい前、、なのでまずは簡単...
電子工作(マイコン全般)  球体ロボット 球体ロボット 電子工作(マイコン全般) 電子工作(マイコン全般) 電子工作(マイコン全般)
球体ロボット 球体ロボット 電子工作(マイコン全般) 電子工作(マイコン全般) 電子工作(マイコン全般)  球体ロボット 球体ロボット
球体ロボット 球体ロボット  球体ロボット 球体ロボット
球体ロボット 球体ロボット