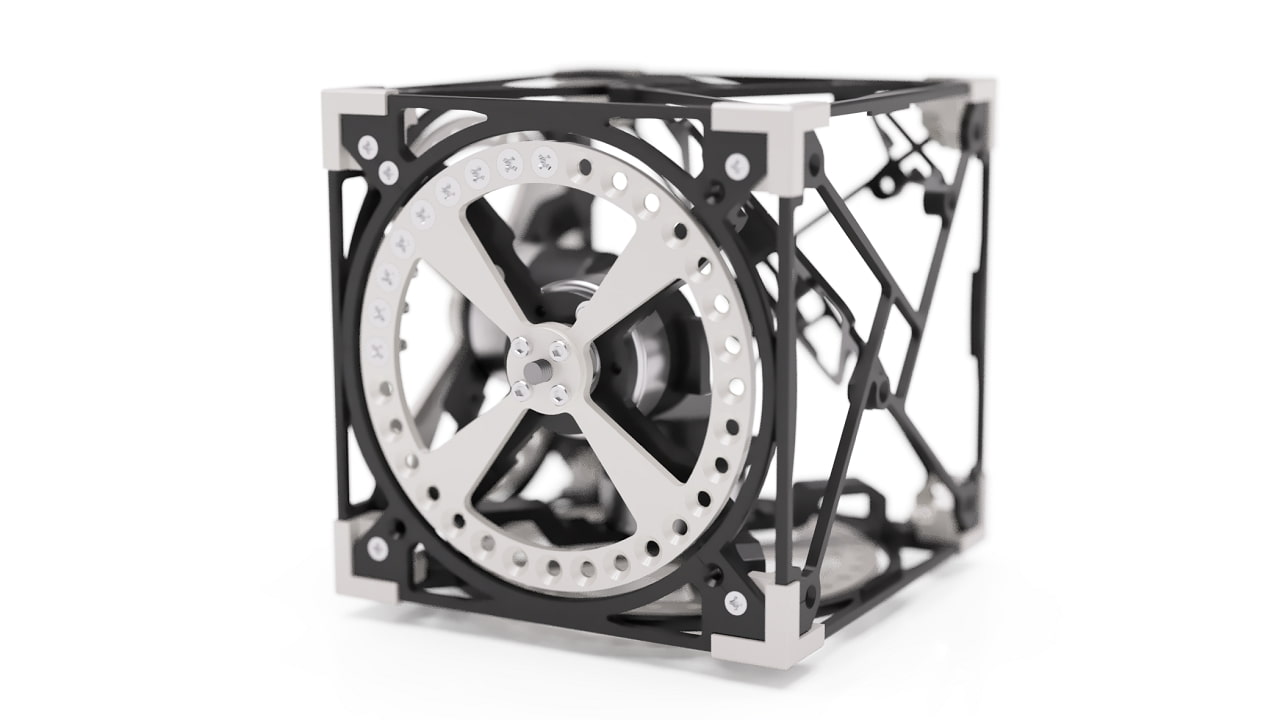
3軸姿勢制御モジュールの自作です。2号機の1軸倒立(1辺)が成功しました。
▼当初▼

さっそく単純に角度PIDで制御を試みたのですがパラメをいくら調整しても倒立する気配無し。このGIF動画のように、手で支えてもまともに倒立しない状態です。
ホイール重量かなと思って少し調整

重量調整に付けてるボルト&ナットですが、当初せっかく?なので目いっぱい付けてます。これで重量は120gくらい、モータートルクとバランス悪いかなと思って少し減らして30gくらい減らして再チャレンジしたのですがほとんど変わらず。。
1号機の時はどうしてたかなと思って当時のソース確認したらいろいろ異なっていたのでとりあえず合わせることにしました。主な変更点は以下。
- 制御周期4ms(250Hz)⇒ 10ms(100Hz)
- 角度PID制御⇒角速度PID制御(外側に角度Pの2重ループ)
▼制御ソースを当時の考え方に戻して再調整した結果▼
モーター回転速度が落ち着くまでに時間が掛かりますが、これは1号機の時からの課題。制御周期はよくわからないですがなぜか遅い方が調整しやすく感じました。
1号機完成してから半年くらい経ってしまってます。少し飽きてきたというか次にやりたいことが出てきたので、完全に飽きてしまう前に少し検討を加速したいと思います。1軸までできれば3軸は拡張するだけなので簡単なはず。。。

コメント