 球体ロボット
球体ロボット 球体ロボの自作|駆動部作成とテスト
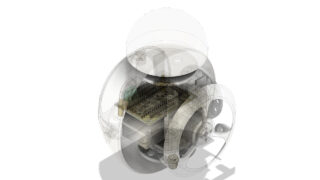
球体ロボの自作です。今回は内部の駆動部分の作成と駆動確認です。 樹脂部分は3Dプリンターで準備します。 PLA(黒)です。面毎にバラバラで出力。 組立て完成。プログラム書き込んで可動確認していきます。 ほんとは球形ですが仮タイヤを両サイドに...
球体ロボット  球体ロボット
球体ロボット  球体ロボット 球体ロボット 球体ロボット 電子工作(マイコン全般) 電子工作(マイコン全般)
球体ロボット 球体ロボット 球体ロボット 電子工作(マイコン全般) 電子工作(マイコン全般)  電子工作(マイコン全般)
電子工作(マイコン全般)  電子工作(マイコン全般) 電子工作(マイコン全般)
電子工作(マイコン全般) 電子工作(マイコン全般)