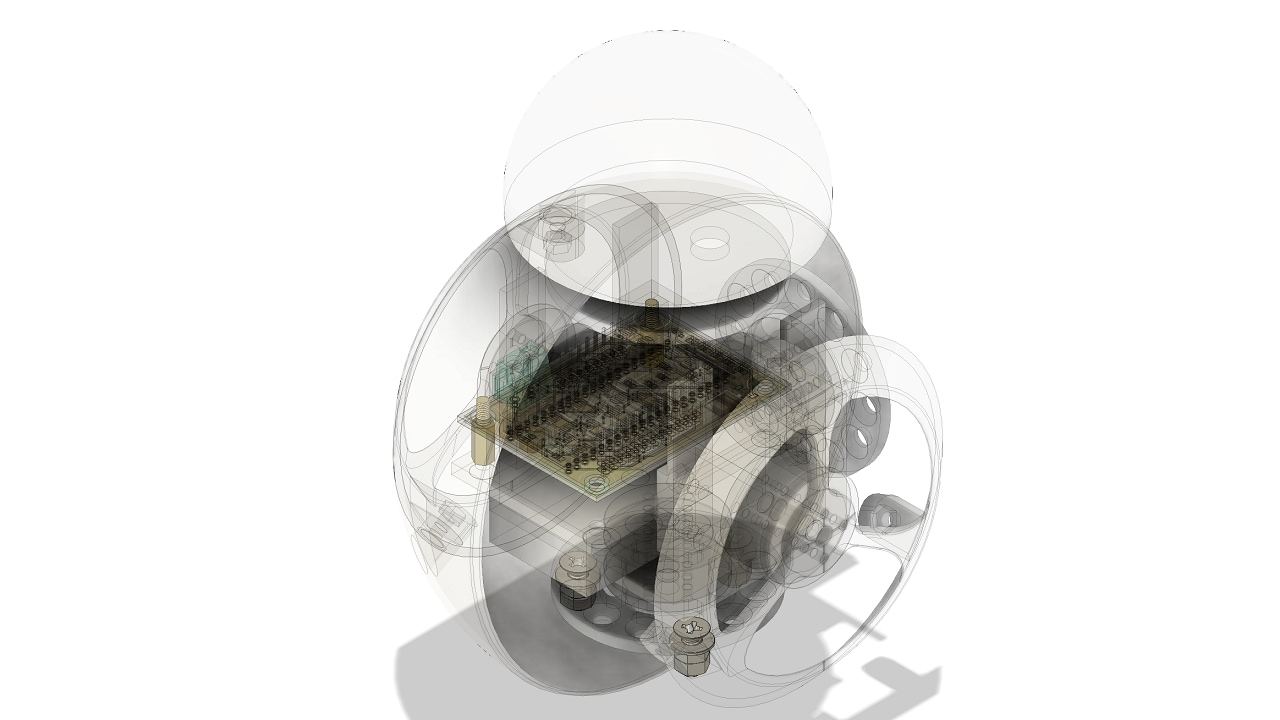
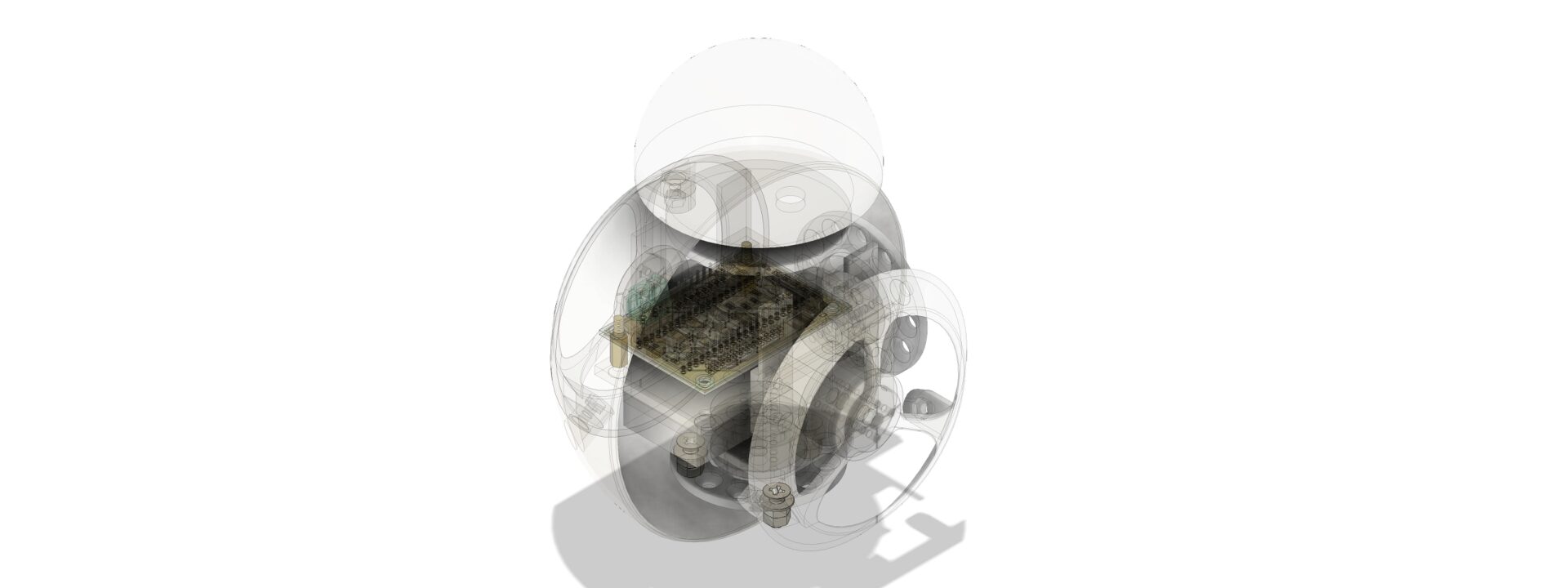
球体ロボの自作です。今回は内部の駆動部分の作成と駆動確認です。
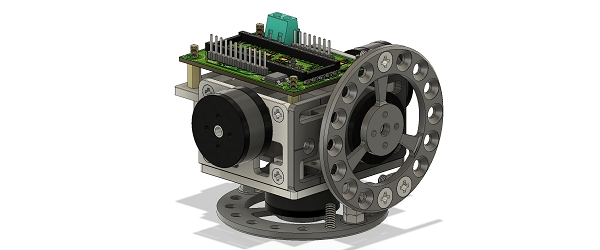
樹脂部分は3Dプリンターで準備します。

PLA(黒)です。面毎にバラバラで出力。
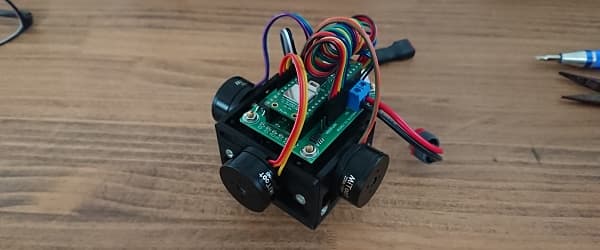
組立て完成。プログラム書き込んで可動確認していきます。
ほんとは球形ですが仮タイヤを両サイドに付けてテスト。手動でモーター操作してます。未制御なのである程度こんな動きになるのは想定内。セグウェイのような2輪駆動なので姿勢制御は必要そうです。
ただ想定していたよりモーターの発熱が大きい。PLAが柔らかくなってしまう程発熱してしまいます。プログラム側で少し電流制限かけると発熱は抑えられますがトルクが微妙な感じ。恐らく自作ESC&プログラムが悪さしいるのかと。ほんとはもっと効率よくモーター制御できるんだと思います。
このまま検討改善続けるか、市販ESC&モーターに変更するか悩みます。

コメント