 通電させられるところまでハードの仮組ができたので、通電して動作確認をしてみました。
通電させられるところまでハードの仮組ができたので、通電して動作確認をしてみました。
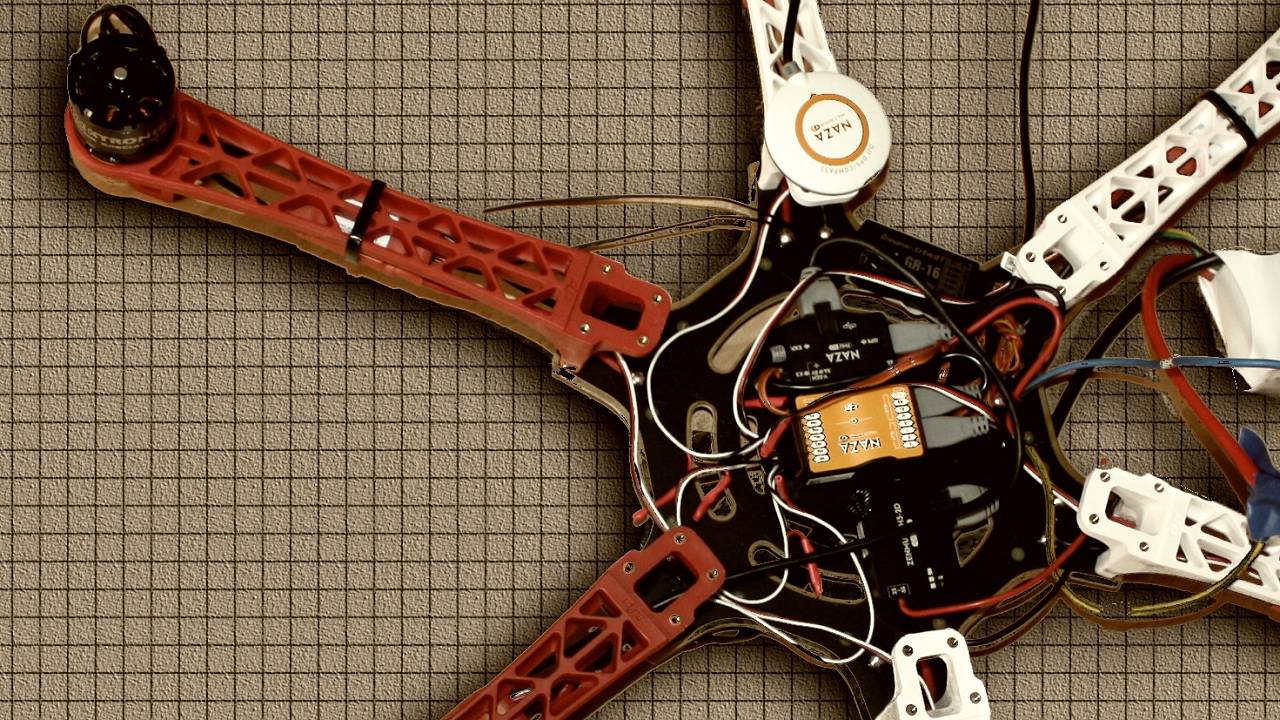
▼配線類は直付けしているだけ▼
機体側では、Arduinoで各種センサー値の取得、姿勢角の算出、モーター制御、とPICで無線通信(Bluetooth)。送信機側(パソコン)では、Processingで各種機体情報をモニターをするのと、モーター(機体)のコントロール。が正常に機能するかを確認してます。
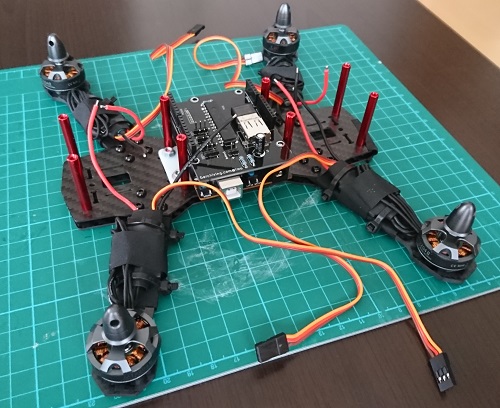
いきなりプロペラをつけると危険な感じなので、回転が分かるようにティッシュをつけてます。

可動確認してみました。
▼確認動画▼
この動画を撮るのに、だいぶパソコンに無理をさせていて・・・・。
- スマホで映している機体(動画)をWifi経由でパソコンにリアルタイム描画
- 機体からBluetooth受信した各種情報をProcessinngでリアルタイム描画
- マウス操作でスロットル情報をBluetooth送信(Processinng)
- パソコン画面のリアルタイム録画処理(この動画)
録画処理がだいぶ重たいようです。Processingの制御周期がものすごく落ちてしまって、描画がカクついてしまってます。録画の方法はもう少し考えた方がよさそうです。
本題の動作確認は無事に動きました。今回は簡単な動作確認が目的だったため、姿勢制御のプログラムは組んでいません。ですので機体を傾けてもモーターは回転しないプログラムになってます。スロットル操作に反応するだけのプログラムにしてます。バッテリモニターも可動させてません。
ただ、動作確認時にいくらか課題が出ました。
▼センサー値にノイズ▼
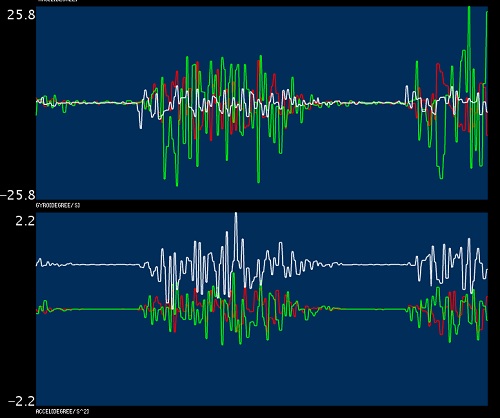
モーター回転時のノイズ?振動??ESCからの高周波ノイズ??、恐らくノイズの類かと思いますが、機体の各種センサー値に結構ノイズが乗ってしまいます。
姿勢制御に悪影響しそうなので何かしら対策が必要かと。無視できるレベルなのかな?きちんと配線取り廻したらおさまる?ハード、ソフトともにいろいろと検証が必要そうです。
あと、パソコンからのマウス操作とキーボード操作でモーター(機体)のコントロールをする予定ですが、マウス操作では結構つらい・・。スロットル操作だけなら何とかなりそうですけど、ch増やすと厳しいかも・・。
とりあえず今回はモーターの回転、モニター動作、無線通信が無事に動いて良かったです。
コメント
久しぶりに拝見しました。
機体を組み立てると一気に完成に近づいたように見えます。最初は市販品を使って正解だったのではと思います。やはり時間がかかりますよね。
センサーにノイズが乗ってるようですが、姿勢推定アルゴリズムによってはノイズに強くなります。以前Madgwickフィルタを試したことがあるのですが、割とノイズに強いです。Arduinoのライブラリが公開されているのでおすすめです。
機体の操縦ですがプロポは高いのでPSコントローラーで代用できます。コントローラーを使えば常に目視確認できるので、安全面からもおすすめです。機体を飛ばす段階になってからの導入が良いかと思います。
おそらくこれから制御プログラムを書いていくと思いますが、PIDのパラメータチューニングをするときテストベンチがないと苦労するかと思われますので一度検討した方が良いかと思います。
最後に怪我などには注意して下さい。初めて4つのプロペラを回すと音がすごいことがわかります。さらに飛行するときにはものすごい音になりビビります。軍手とか保護メガネも用意するといいかもしれません。
長文失礼しました。
Anon.さん 記事をご覧頂き有難う御座います。
確かに組み立てがある程度出来上がると、だいぶ完成したように錯覚してしまいますね。本題の姿勢制御アルゴリズムがこれからですので、先の長い戦いが始まりそうです。
ノイズに関してはお手製のフィルターやカルマンフィルターを試そうかと思っていたところです。Madgwickフィルタは視野に入れていなかったので検討に入れたいと思います。
PIDチューニングはどうやってやろうか悩んでいたところです。やはりある程度正確にベンチは必要ですよね?。ブラシレスモーターのパワーには少し驚きました。当初、コアレスで検討していたのがかなり無謀であったことがよく分かりました。記事中動画でティッシュつけてますが、あれで10%程度の出力です。それでも風切音がすごかったですね(動画には音入ってませんが・・。。ティッシュだからかな)。
またお気づきのことがありましたらアドバイス頂けると有りがたいです。