

球体ロボット(BB-8)の自作です。今回はRaspberry Pi PicoからブラシレスDCモーターの回転テストをしてみます。
概要
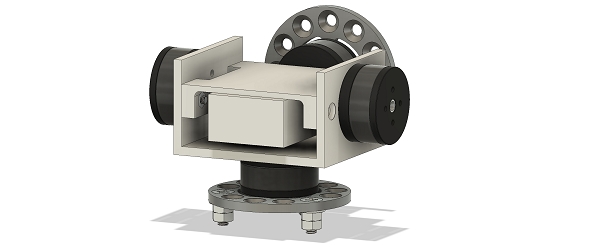
構想中の内蔵物。モーター4個使う予定です。両サイドは球体の移動用。他は姿勢制御用として考えてます。

入手したBLDCモーター(2206 100T)。これがそのまま使えればいいのですがサイズがΦ30㎜×15mm程度と小さいのでトルクが少々心配。今回は軽く駆動テストを行います。
リアクションホイール作成
球体の姿勢制御にリアクションホイールを使う予定。実際にホイール付けて回転させてみて具合を確認してみます。

さっそく3Dプリントしてモーターに装着。ボルトナットでホイールの重量増してますが思ったよりも軽い。さらに径もそれほど取れてないので反トルクが少し弱いかも。モータートルクも気になりますがホイール半径/軽さも気になります。
テスト構成
以前はDRV8835ドライバをハーフブリッジの変わりに使用したのですが今回はL293Dドライバを使ってみます。
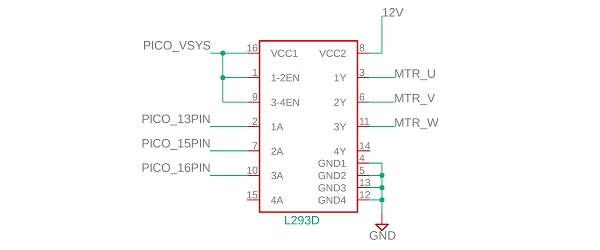
ハーフブリッジが4回路入っているためこれ一つでBLDCモーターを駆動できます。
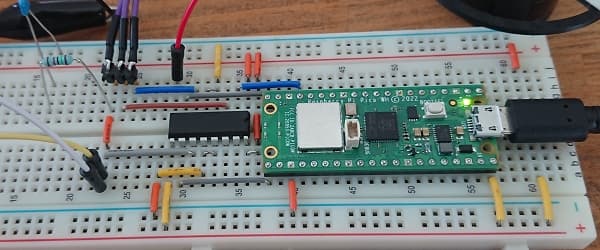
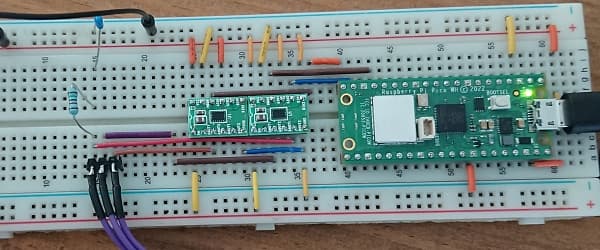
RaspberryPiPicoとブレッドボードで配線。プログラムは正弦波駆動をテストしたときのものを使用します。
駆動テスト

回転は成功。GIF動画では伝わりませんがトルクはこんなもんかなとだいたいイメージ通り。ドライバICの発熱もそれなりに発生。モーターの急制動/急反転させたときにすぐに脱調してしまいます。
L293Dはどうもバイポーラトランジスタを使用しているため発熱が多いよう。BLDCモーターではきついのかな、、なので今後はMOSFETで構成を考えていくことに。脱調については制御プログラムを以下のイメージに変更することで対応してみます。
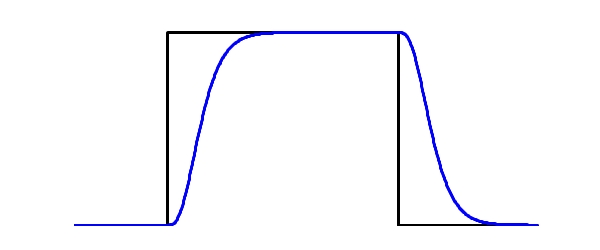
モーターへの速度指示イメージです。元々黒線で制御していたのですが速度切替や方向反転時のホイール反トルクに負けて脱調が起こっている感じです。ちなみにホイール無しの無負荷状態でも急回転/急反転時にはすぐ脱調してしまいます。
なので青線のイメージように少し慣性を緩和するよう制御プログラムを変更してテストしてみます。
駆動再テスト
モータードライバはMODFET使用のDRV8835に戻しました。新しいプログラム書き込んでテストです。
脱調することなく急反転の指示でもうまいこと回転します。ICの発熱もほぼ無し。ただホイール反トルクを緩和するように制御してるのでリアクションホイールとしては逆効果?。
球体の移動用モーターと姿勢制御用モーターでは、回転制御の方法を変える必要があるかもしれません。
モーター自体は使えそうなのでとりあえずこのモーターで検討を進めていきたいと思います。
コメント