

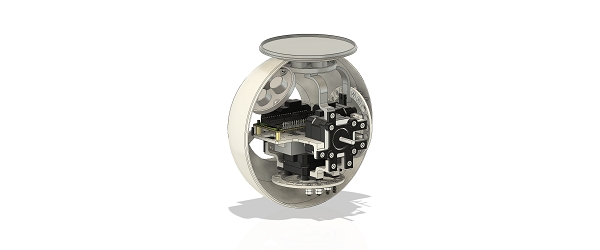
随分、間が空いてしまいましたが球体ロボの自作を再開です。
ブラシレスモーターで駆動確認した時の物。未制御なので走行がふらふらです。モーターのトルクが思いのほか弱いのでモーターの種類いろいろ検討してたんですが結局ステッピングモーターに換装することにしました。
細かい設計をやり直し。モーターサイズの関係で結構サイズアップしてます。Φ130cm⇒Φ180cmほどにサイズアップ、さらにトルク不足にならないか少々心配です。
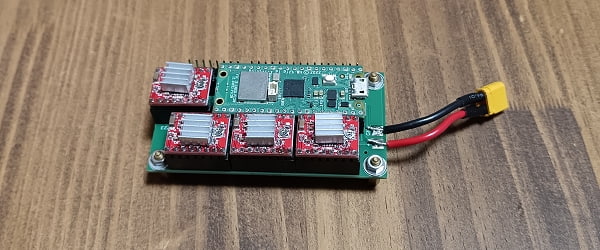
モーターを変更するので制御基板も作り直し。モータードライバーはA4988使用、マイコンRaspberryPyPicoと電源レギュレーターを繋いでるだけの基板です。

3Dプリンターで骨組みを印刷して組立て。パンジャンドラムみたいと言われましたが最終的には球体にします。今回は可動確認するだけなので簡素な車輪にしてます。

プログラム書き込んで駆動確認です。やはり未制御だとふらふら。トルクに関してはBLDCのときに比べればだいぶ安心感はあります。
ちょっと間が空いてしまいましたが構想が決まってきました。次は姿勢角をモーター回転にフィードバックしてふらふら感を無くしてみたいと思います。
コメント