球体ロボの自作です。前回は簡単にモーターの駆動テストを実施してみました。今回は制御基板を作成していきます。


球体ロボットの自作|モーター駆動テスト
球体ロボット(BB-8)の自作です。今回はRaspberry Pi PicoからブラシレスDCモーターの回転テストをしてみます。概要 構想中の内蔵物。モーター4個使う予定です。両サイドは球体の移動用。他は姿勢制御用として考えてます。 入手し...
garchiving.com
2025.06.01
概要
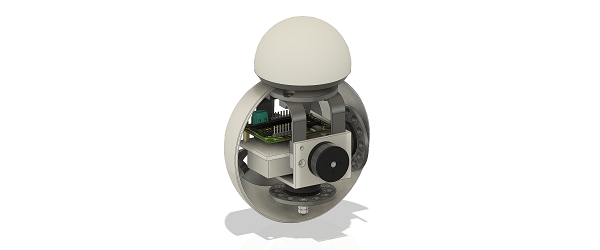
完成はしてませんが筐体設計もぼちぼち進んでます。ガワはほぼBB-8。BLDCモーターを計4つ使う予定。他に6軸センサー、バッテリ電圧監視などの搭載を予定しているのですが、回路テストをブレッドボードやユニバーサル基板で行うのはかなり厳しそう。なので回路基板を先に作成してしまうことにしました。
回路・基板設計
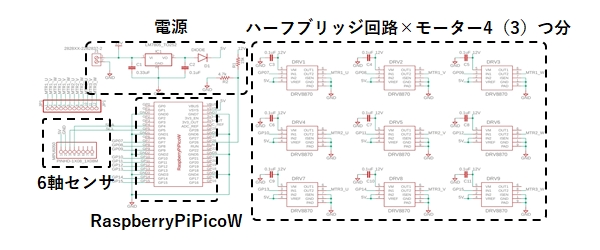
回路構成の概要です。ブラシレスモーターは市販のESCは使用せずDRV8870ドライバをハーフブリッジの変わりにして構成。あとは6軸慣性センサーと電源廻り。マイコンはRaspberryPi PicoWを使います。DRV8870には電流センサも付いてるようでしたが使用してません。
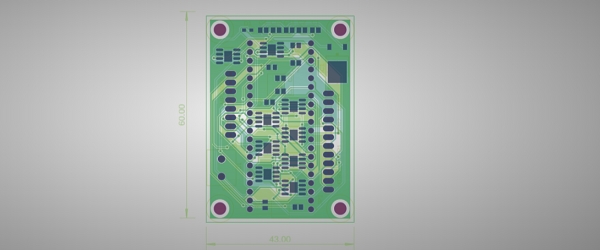
基板データ。最近の回路CADはかなり便利で部品を配置するだけで他はちょいちょいとするとほぼ自動で基板データになってしまいます。素人ですし動けばいいのでこれで十分。今回はJLCPCBに注文。表面部品実装もお願いしました。
基板組立て
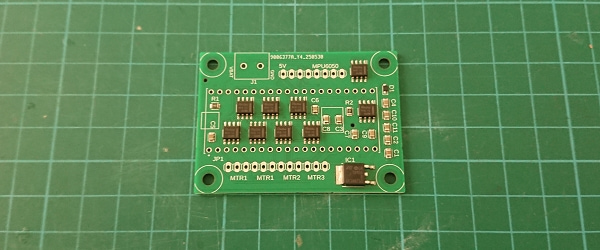
注文してから8日後に届きました。送料込みで$14程度。たまにしか基板作成しないので久しぶりに、半年ぶりくらいにログインしたのですがなんかクーポンがいろいろあって、TOTALで$15くらい割引きされてます。なので実質半額以下。
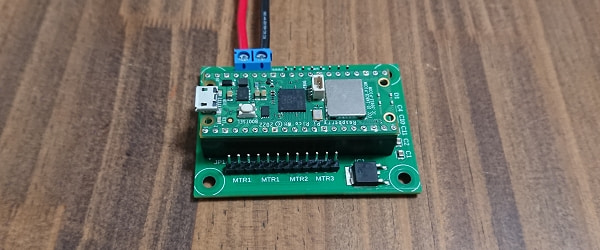
簡単に導通確認してスルーホール部品を半田付けして制御基板の完成。続いて稼働テストをしてみます。
稼働テスト
6軸センサーテスト
まずは6軸センサーを繋いで値を取得してみます。
6軸センサーはMPU6050を使用。取得値を可視化してます。問題無くI2C通信を確認。
モーター駆動テスト
モーター2つでテスト駆動。ほんとは4つですが準備できなかったのでとりあえず2つでテスト。こちらも問題無し。4つのBLDCモーターの駆動制御はプログラムややこしそう。
とりあえず動いてほっとしてます。回路設計/基板設計/注文/組立てと制御基板の作成には結構時間が掛かります。でもちゃんと動くかどうかは最後稼働テストするまでわからない。今回はうまくいきましたが神経を使うので制御基板の作成は苦手です。電流センサ使わないにしても回路だけでも繋いでおけばよっかたです。

球体ロボットの自作|製作記録
BB-8(球体ロボット)を自分でも作ってみたいと思い、まずはそれっぽいものの自作をはじめました。ハードは3Dプリンターでの出力品をメインで、ソフトはArduinoをメインに製作していくつもりです。その製作記録です。 駆動部分の可動テストです...
garchiving.com
2019.04.05
コメント
Hello.
I’m new here 🙂