

小型化の検討に着手しました。前回スタンドアローン化まで進めて他にもやりたいことがあったのですが小型化検討含めて筐体設計からやり直すことにしました。
▲一号機です。最初からここまで行くとは思ってなく、途中で作り直し前提で検討していたのですが思いのほかスムーズにいきました。なのでこだわれていない部分や一見えた部分もいろいろあるので、小型化兼ねて筐体設計からやり直します。
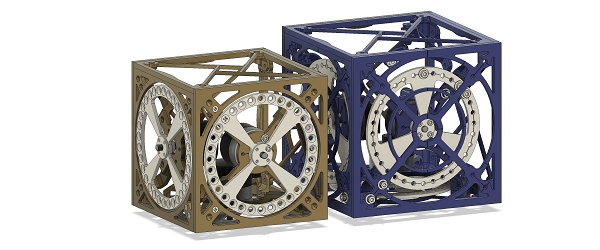
左側のが新しい筐体。ホイールの直径(Φ116)はそのままで全体をひと廻り小型化。1号機はホイールガード部分が回転中に干渉して破壊してしまったので今回はガードは無くしてます。今回も部品の多くは3Dプリンターで作成。そのためきちんと成型(積層)できるよう3Dモデルを作成していきます。
全体サイズはほぼモーターの大きさで決まってしまうので今回はぎりぎりまでモーター間の隙を詰めてます。もう少し小型のモーター見つけたかったのですがいいのが見つからなかったので使い廻し。そのうちいいの見つかったらまた作り直すかもしれません。
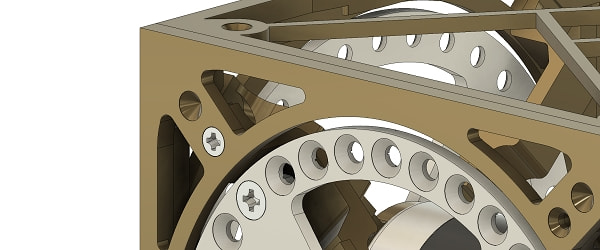
細かい所を改造してます。ボルト頭が飛び出すところは皿小ねじを使用してすっきりさせます。ついでに筐体の接続構造(角部)も見直して部品点数減らします。他細かいところをいろいろ見直してるのですが細かすぎるので割愛。隙関係はかなり攻めているので1号機同様に干渉して壊れてしまうかも。。
進捗が悪いですが、なんとか最後までやり切りたいと思います。あとマイコンはESP32⇒ラズパイPicoに変更予定。回路設計見直すのはちょっと面倒というか苦手。

コメント