 Arduino
Arduino ArduinoでI2C通信の方法
周辺デバイスとのデータ通信で使われるI2C通信ですが、使うたびにその方法を調べるのも結構面倒です。ArduinoのI2C通信方法を備忘録かねて要点(必要最低限な内容に絞っての使い方)だけまとめておきます。(Arduinoを久しぶり(半年くら...
Arduino 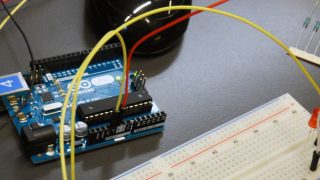 小ネタ
小ネタ  Arduino
Arduino 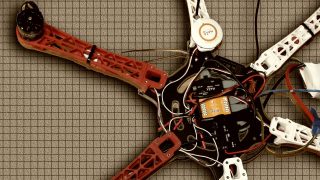 Quad Copter(ドローン)
Quad Copter(ドローン)  Arduino
Arduino 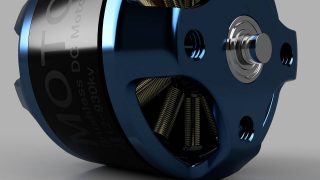 Quad Copter(ドローン)
Quad Copter(ドローン)  Quad Copter(ドローン) Quad Copter(ドローン)
Quad Copter(ドローン) Quad Copter(ドローン)  小ネタ
小ネタ  Arduino
Arduino